浅聊一下shader中的光线追踪
背景
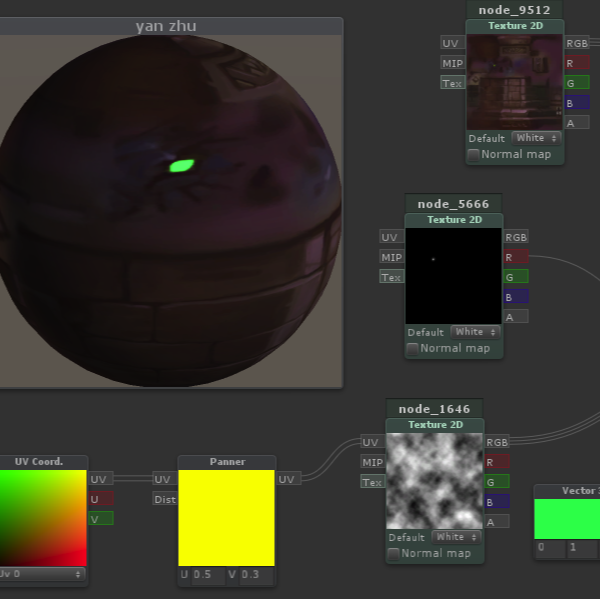
今天给大家来谈谈下shader高级中的光线追踪,我想在座的大佬有可能没有听过光线追踪,但一定见过大名鼎鼎的下面这张图。
几乎你在看到的用shader做的大多数三维场景均是采用光线追踪技术为基础做的。当然还有非常多有名气的例子。
先简单通俗理解一下光线追踪原理。其实就是通过射线法不断去迭代,最终找到场景中模型的边界。类似我下面这张图。我们今天给大家主要介绍的是“球体光线追踪算法”。今天我们尝试在3D场景中绘制一个球体为例子。
整体架构图
下图是我关于光线追踪的一个整体关系图。

对象的意义
我先简单解释下下图的几个要点对象的意义:
1、我将canvas或屏幕设置成z=0的临界。设想一下此刻屏幕上是由很多大小的像素组成,并未每个极小的像素点都有自己的坐标。我们可以用(uv.x,uv.y)来代替。如下图所示

2、黑色是我们场景中假设的相机。确定一个相机我们需要三个元素,(在webgl初级课程中给大家明确讲到过)分别是position updirection eyedirection。假如此刻我们假设相机参数如下:
vec3 position = vec3(0.,0.,10.)
vec3 updirection = vec3(0.,1.,0.);
vec3 eyedirection = vec3();这里我重点强调下eyedirection,它代表的是从摄像机射出的不同角度的射线,每条射线分别穿过canvas上不同的uv坐标点。我们基于蒙特卡洛技术以一个调皮的光线为例子去探讨。
3、下面黄色的东西是我们的地平面。我们绘制的场景是让我们的球体能够立在我们的地平面上。我们地平面实际存在一个高度,h。
4、最后解释下我们蓝色球体。这部分实际上和我之前写的SDF是一样的,我们本质可以归类为球体的SDF,文章地址
float sdSphere(vec3 p, float r)
{
return length(p) - r;
}对象间关系(实现逻辑)
讲解完各自对象代表的意义,我再介绍下各个对象之间的相关关系,也是我们后面代码的实现思路。
步骤一:摄像机假设发射一条长射线(射线a,也叫”阿波罗11号射线“),我们以这条射线为半径不断去绘制圆,直到我们绘制的圆与球体相交后,需要找到该圆与射线相交的点,作为新的中间“加油站”。然后在这个“加油站”我们称之为P1,之后我们再以P1为圆心,再去沿着射线方向继续绘制圆,直到绘制的圆与球体再次相交后,需要找到该圆与射线相交的点(等同于P1到球体的最短距离),作为新的中间“加油站”。然后在这个“加油站”我们称之为P2(P2坐标等同于P1坐标+P1到球体的最短距离)。按照此规律射线上的点不断推进.......我们称这个过程为“光线行进”。
步骤二:步骤一中我们用到P1、P2点到球的最短距离,这个公式我们需要用到的就是 球体的SDF。直到我们光线的最短距离求的值比如小于一个很小的临界值,我们就判断为该光线与球体表面的点相交啦。这时候我们会保存该点到相机的距离,从而将该球体表面的点的位置记录在内存里。
float sdSphere(vec3 p, float r)
{
return length(p) - r;
}步骤三:假设我们发出的“阿波罗11号射线”在中间没有遇到任何阻碍,其实就是没有碰到球的任何表面。是不是会射向无限远的地方,那估计我们电脑会无线叠加,那估计就跑费了。所以我们需要设置距离相机最远距离,如果该位置超过此值就默认停止。

好了我们来实现一下吧
实践
步骤一:坐标标准化(这部分我们不在阐述,shader中级专门讲解了)
vec2 uv = (gl_FragCoord.xy-u_resolution.xy*.5)/min(u_resolution.x,u_resolution.y);步骤二:确定相机参数,position和eyedrection
vec3 eyeposition = vec3(0, 0,1.); //相机的位置,此刻想像一下他是在我们屏幕的左边。
vec3 eyedrection =normalize( vec3(uv,0.0)-eyeposition); //求从相机射出的不同射线。步骤三:rayMaching函数,我们来看看代码如何实现的哈。
float rayMaching(vec3 eyedrection,vec3 eyePosition){
float d = START_POSITION;//初始点的位置
for(int i = 0;i<MAX_ITERATIO_NNUMBER;i++){
vec3 p =eyePosition+ d* eyedrection; //光线行进,不断去往前推进点
float newd = sdfSphere(p ,1.);//获得当前点与球的最短距离
d+=newd;//将位置进行累计,记录到内存,当下一次进行“光线行进”时候当做参数
if(newd<MIN_DISTANCE||d>END_POSITION){ //最短距离小于很小很小的一个值停止或者大于最大距离的时候停止
break;
}
}
return d; //最后我们将每条射线与球的交点位置返回
}球体SDF别忘了,稍微做了小小变形,将球体的位置添加进去了。
float sdfSphere(vec3 p, float r){
vec3 sphere = vec3(0.,0.,-5.);
return length(p-sphere)-r;
}步骤四:如果光线返回的距离大于100(不一定是100哈,这个值只要是大于或者等于相机距离的最远距离即可),说明光线冲向了无限远,没有和球体有交点,反之则击中了球体,进而设定其颜色
if (d > 100.0) {
col = vec3(1.);
} else {
col = vec3(0.6,0.2,0.2);
}
当然你也可以根据与球体最小距离判断,进而改变球体的颜色,请注意此时光线追踪函数rayMaching返回的值应该是每次实时计算与球体的距离
if (d < 0.01) {
col = vec3(1.);
} else {
col = vec3(0.6,0.2,0.2);
}整体代码如下
// Author: ice
// Title: 光线追踪
#ifdef GL_ES
precision mediump float;
#endif
#define MAX_ITERATIO_NNUMBER 255
#define MIN_DISTANCE 0.001
#define START_POSITION 0.
#define END_POSITION 100.
uniform vec2 u_resolution;
float sdfSphere(vec3 p, float r){
vec3 sphere = vec3(0.,1.,-5.);
float plane = p.y-0.;
return min(length(p-sphere)-r,plane) ;
}
float rayMaching(vec3 eyedrection,vec3 eyePosition){
float d = START_POSITION;
for(int i = 0;i<MAX_ITERATIO_NNUMBER;i++){
vec3 p =eyePosition+ d* eyedrection;
float newd = sdfSphere(p ,1.);
d+=newd;
if(newd<MIN_DISTANCE||d>END_POSITION){
break;
}
}
return d ;
}
void main() {
vec2 uv = (gl_FragCoord.xy*2.-u_resolution.xy)/min(u_resolution.x,u_resolution.y);
vec3 col = vec3(0);
vec3 eyeposition = vec3(0, .3,.9);
vec3 eyedrection =normalize( vec3(uv,0.)-eyeposition);
float d = rayMaching(eyedrection,eyeposition);
if(d<20.){
col = vec3(0.376,0.830,0.758);
}else{
col = vec3(1.);
}
gl_FragColor = vec4(col,1.0);
}本节内容到此结束,下期节目我们再见!

相关文章

热门文章
热门问题
热门标签
 shader
shader
 WebGL
WebGL
 cesium
cesium
 threeJS
招聘
threeJS
招聘
 gis
vue3
区域场景编辑器
gis
vue3
区域场景编辑器
 模型
TvT
模型加载
区域编辑器
模型
TvT
模型加载
区域编辑器
 glsl
地图数据
vite
点击事件
城市gis
VUE
绘制点
建模
three
UE5
自定义着色器
vue3-ts-cesium-map-show
cesium贴图材质
插件
WEBGIS
useTresContext
goview
@tresjs/core
texture
实现热力图
模型加载报错
求助
3d tiles
模拟导航
三维图表
goview组件
相机
插件购买确认
动画
事件
需求
开发
模型获取
javascript
html
css
集成tvt.js插件子应用
3D算法渲染
glsl
地图数据
vite
点击事件
城市gis
VUE
绘制点
建模
three
UE5
自定义着色器
vue3-ts-cesium-map-show
cesium贴图材质
插件
WEBGIS
useTresContext
goview
@tresjs/core
texture
实现热力图
模型加载报错
求助
3d tiles
模拟导航
三维图表
goview组件
相机
插件购买确认
动画
事件
需求
开发
模型获取
javascript
html
css
集成tvt.js插件子应用
3D算法渲染